ublox C94-M8P应用板使用配置方法
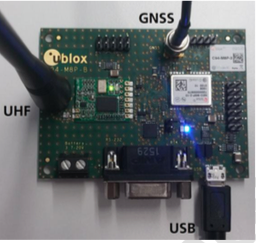
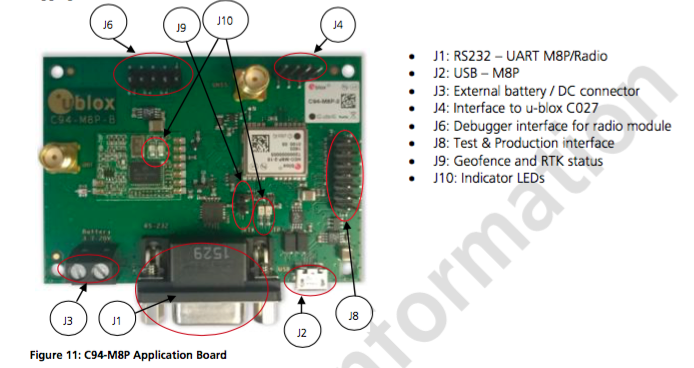
硬件安装和接口定义1
Base端配置
用usb线将应用板与PC连接。打开u-center2,菜单栏的Receiver下,Port选择系统安排的串口号,Baudrate选择115200。
配置GNSS
菜单栏选择View->Configuration View,选择GNSS,按下图设置,令应用板接收GPS和Beidou信号:
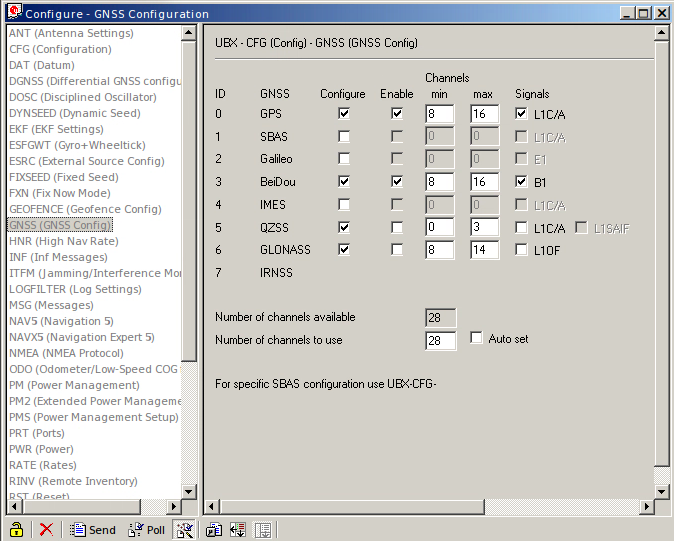
更改设置后,记得要按下方的Send按钮将参数上传到应用板上。
配置Messages
Configuration View栏目中选择MSG,然后在窗口右边Message下拉栏目中选择F5-05 RTCM3.1 1005,F5-4D RTCM3.1 1077和F5-7F RTCM3.2 1127,然后分别将UART1选上,值为1。
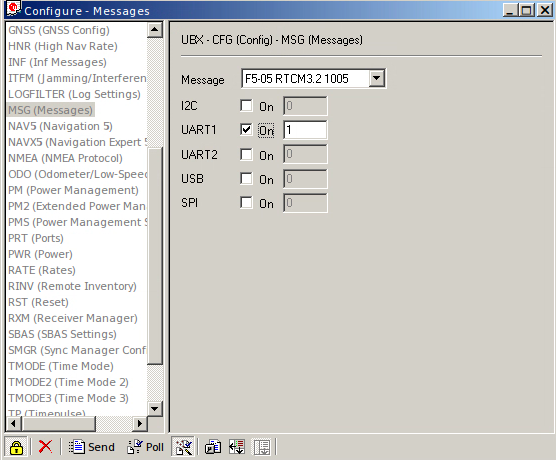
再一次提醒,更改设置后,记得要按下方的Send按钮将参数上传到应用板上。
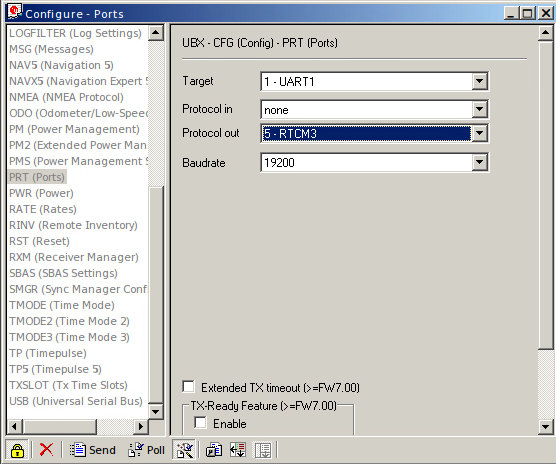
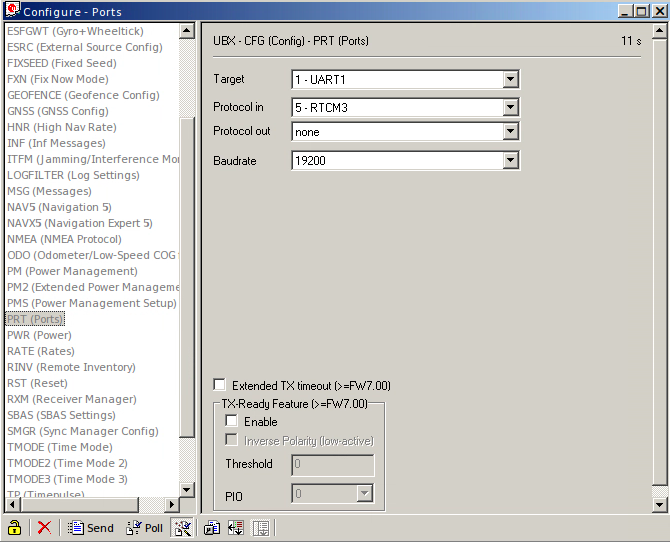
配置Base Radio Link
Configuration View栏目中选择PRT,如下进行设置:
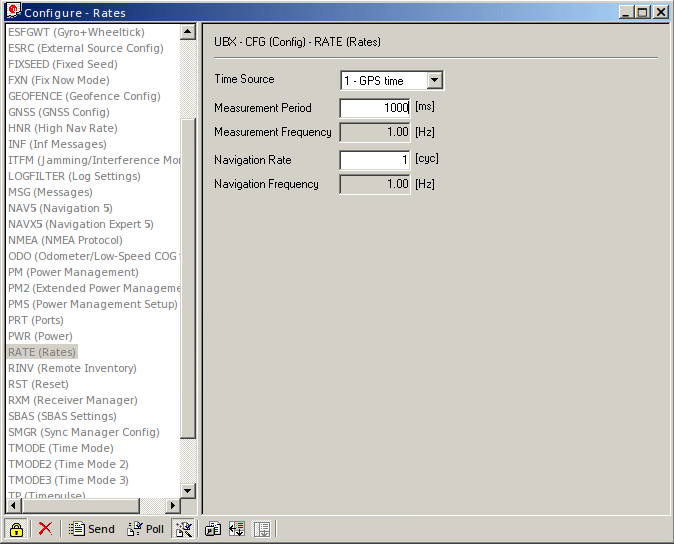
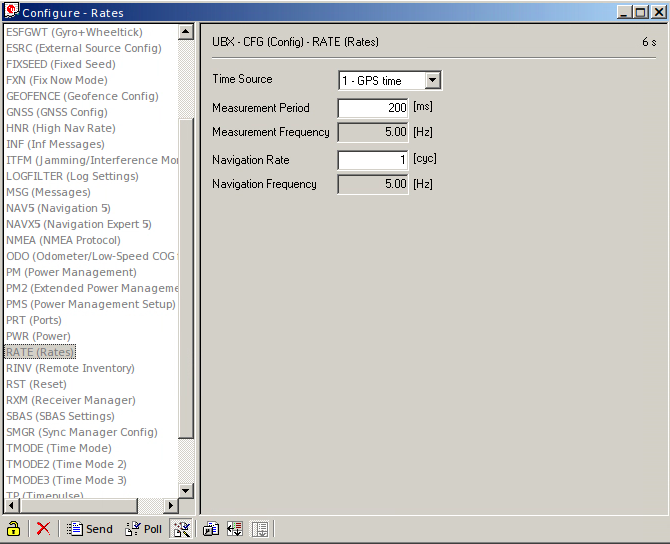
设置工作频率
Configuration View栏目中选择RATE,如下进行设置:
配置Survey-in mode
Configuration View栏目中选择TMODE3,如下进行设置:
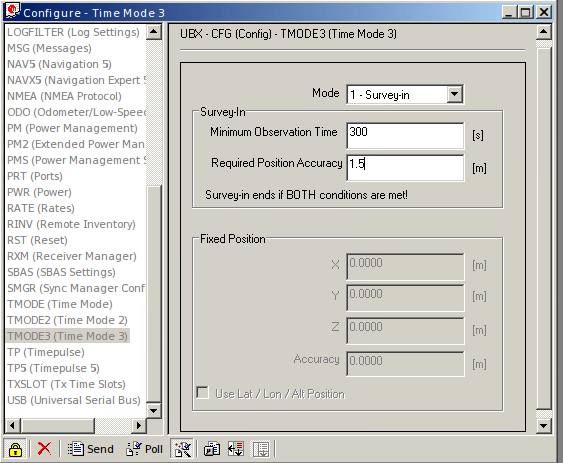
Minimum Observation Time和Required Position Accuracy的值可以根据实际情况进行修改。
菜单栏选择View -> Messages View,然后再选择UBX -> NAV -> SVIN
可以查看收敛情况:
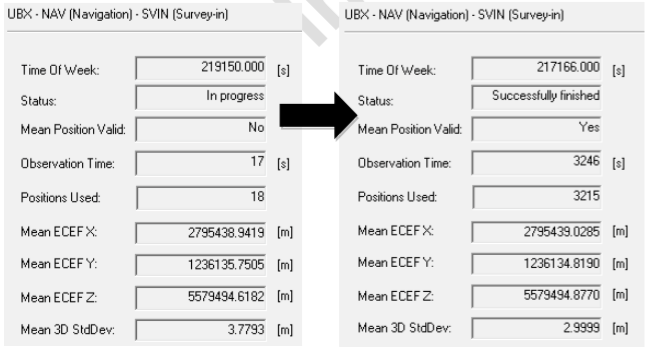
当Status变为Successfully finished时,基站进入了正常的运作模式。
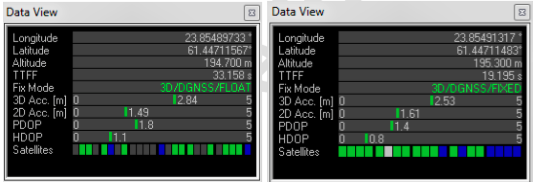
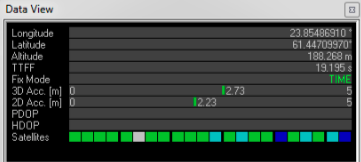
正常运作状态
在STATUS窗口中,Fix Mode显示为Time。
Rover端配置
接上PC,并且按上文所述配置好GNSS。
设置Rover Radio Link
Configuration View栏目中选择PRT,如下进行设置:
设置工作频率
Configuration View栏目中选择RATE,如下进行设置:
正常运作状态